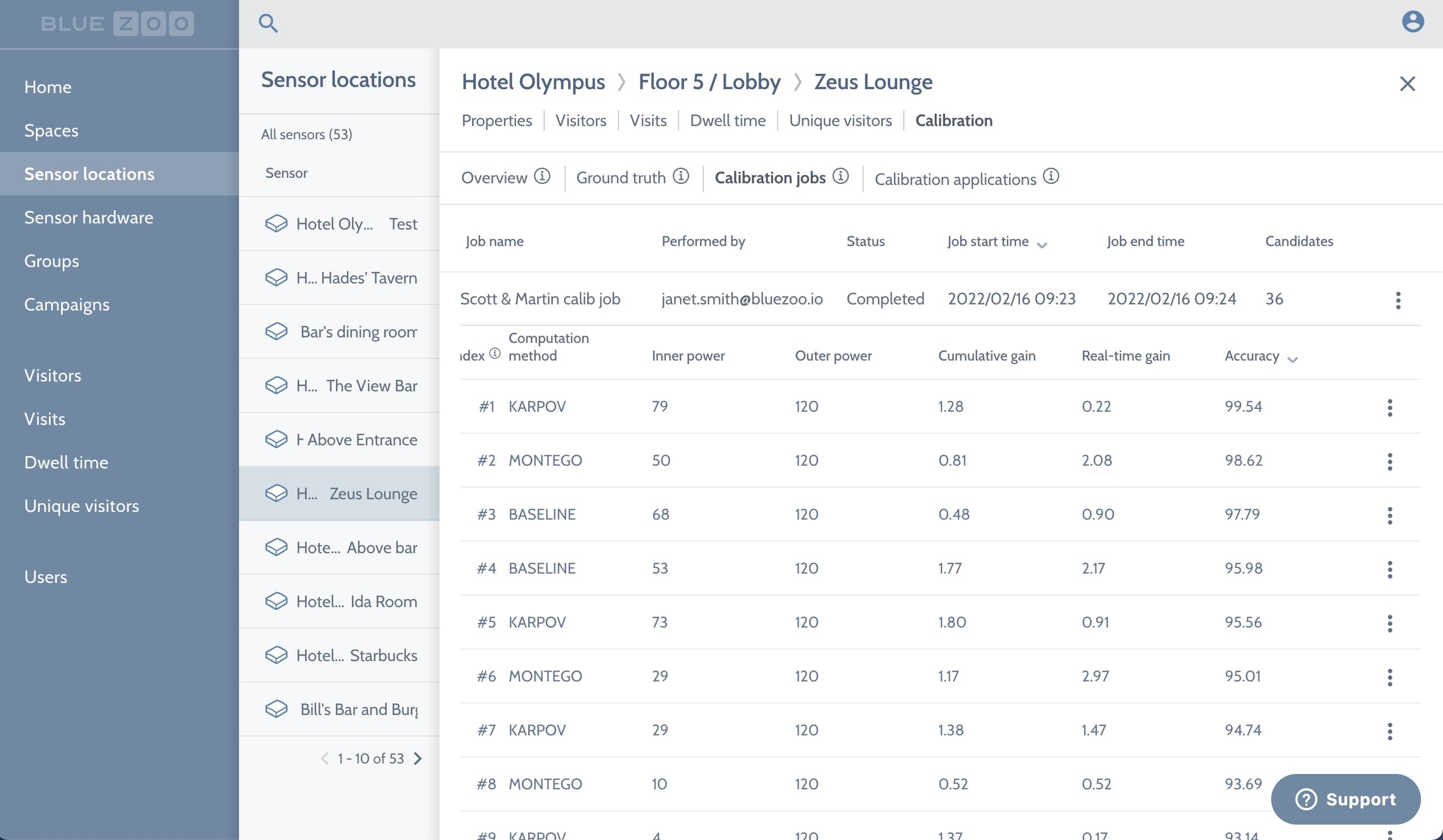
Calibration candidates are listed under the calibration tab of your sensor location. Click on the list shows the top 27 calibration candidates.
The candidate labeled “#1” is the recommended candidate because its calculated results are the most accurate. Said another way, its parameters generate the closest match between sensor-reported “visitors/visits” and “visitors/visits” reported by ground truth collection. You can apply this candidate, another candidate, or manually create a custom set of calibration values.
As of this writing, there is still a little room to adopt candidates not labeled #1. Our calibration algorithms account for the features of different computation methods and the ground truth data available. Without long experience or guidance from BlueZoo’s Customer Success team, the #1 candidate is generally the best choice.
Two second-order criteria taken into account by BlueZoo’s Customer Success team are the following:
- Having a signal power threshold consistent with the expected detection range;
- Having a gain value close to 1. In most use cases, you choose to optimize your calibration either for Visit (i.e. cumulative gain) or for Visitor (i.e. real-time gain) count. If you want to accommodate both, use the Accuracy percentage calculated for each candidate.
Generally, the key ingredient to good calibration is good ground truth. The more good ground truth you collect and submit to the calibration engine, the better your calibration will be.
Comments
0 comments
Article is closed for comments.