Accuracy is a measure of the closeness between sensor-reported “visitors/visits” and “visitors/visits” reported by ground truth collection. The objective of calibration is to set computation model parameters for each sensor location so that reported visitors/visits perfectly match collected ground truth.
The following diagram shows six ground truth samples (headcount snapshots) for a sensor location, along with the corresponding values reported by BlueZoo for some computation methods calibrated with some set of calibration parameters. Conceptually, each BlueZoo computation method is a curve that maps sensor inputs to a calculated output (i.e. BlueZoo’s Reported Values).
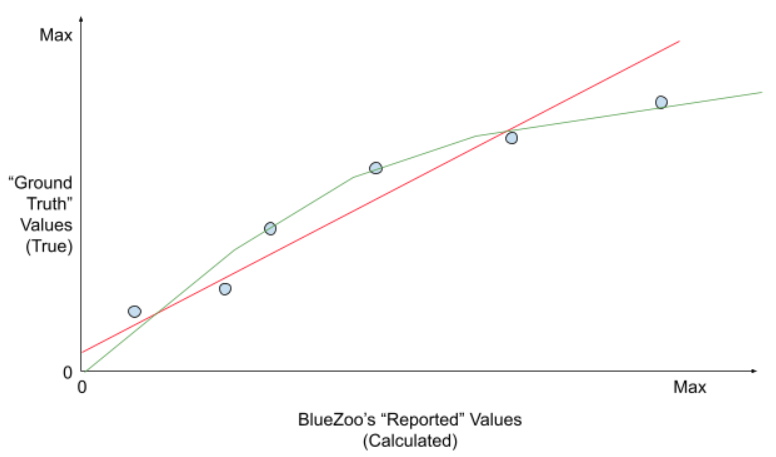
BlueZoo five computational models are Baseline, Juno, Karpov, Molokai, and Montego. Some models are linear, and some non-linear. In every case, we deliver a better result if the ground truth data have widely varying values.
Drawing a linear model through the blue dots above is easy. Drawing a linear model through closely grouped dots, with approximately the same ground truth counts, will not deliver good calibration parameters. See the diagram below. Multiple linear models (“lines”) are all possible, and none can deliver calculated values with high confidence.
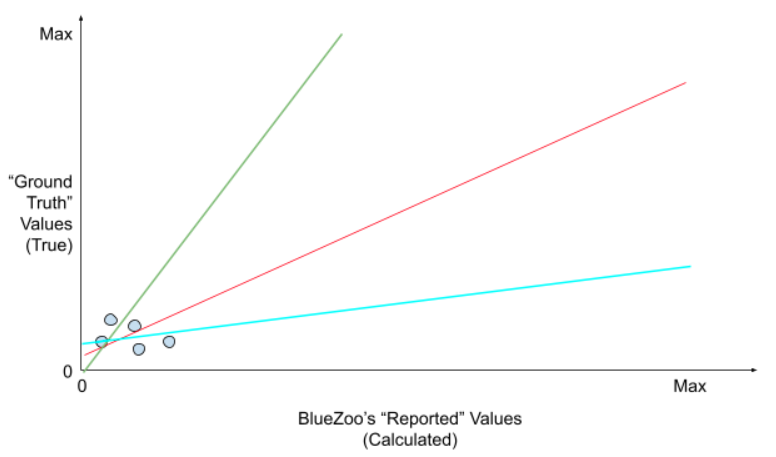
It is very important to collect ground truth at low, medium, and high levels of occupancy. High occupancy may occur at only specific
Comments
0 comments
Article is closed for comments.